
Примеры решения задач линейного программирования симплекс метод – -.
Линейное программирование/Симплекс-метод/Табличный Симплекс метод — Пример
Необходимо решить задачу линейного программирования.
Целевая функция:
2x 1+5x2+3x3+8x4 →min
Ограничивающие условия:
3x1+6x2-4x3+x4≤12
4x1-13x2+10x3+5x4≥6
3x1+7x2+x3≥1
Приведем систему ограничений к каноническому виду, для этого необходимо перейти от неравенств к равенствам, с добавлением дополнительных переменных.
Так как наша задача — задача минимизации, то нам необходимо преобразовать ее к задаче на поиск максимума. Для этого изменим знаки коэффициентов целевой функции на противоположные. Элементы первого неравенства записываем без изменений, добавив в него дополнительную переменную x5 и изменив знак «≤» на «=». Т. к. второе и третье неравенства имеют знаки «≥» необходимо поменять знаки их коэффициентов на противоположные и внести в них дополнительные переменные x
3x1+6x2-4x3+x4+x5=12
-4x1+13x2-10x3-5x4+x6=-6
-3x1-7x2-x3+x7=-1
Переходим к формированию исходной симплекс таблицы. В строку F таблицы заносятся коэффициенты целевой функции с противоположным знаком.
x1 | x2 | x3 | x4 | Своб член | |
| F | 2 | 5 | 3 | 8 | 0 |
| X5 | 3 | 6 | -4 | 1 | 12 |
| X6 | -4 | 13 | -10 | -5 | -6 |
| X7 | -3 | -7 | -1 | 0 | -1 |
В составленой нами таблице имеются отрицательные элементы в столбце свободных членов, находим среди них максимальный по модулю — это элемент: -6, он задает ведущую строку — X6. В этой строке так же находим максимальный по модулю отрицательный элемент: -10 он находится в столбце X3 который будет ведущим столбцом. Переменная в ведущей строке исключается из базиса, а переменная соответсвующая ведущему столцу включается в базис. Пересчитаем симплекс-таблицу:
| X1 | X2 | X6 | X4 | Своб член | |
| F | 0.8 | 8.9 | 0.3 | 6.5 | -1.8 |
| X5 | 4.6 | -0.4 | 3 | 14.4 | |
| X3 | 0.4 | -1.3 | -0.1 | 0.5 | 0.6 |
| X7 | -2.6 | -8.3 | -0.1 | 0.5 | -0.4 |
В составленой нами таблице имеются отрицательные элементы в столбце свободных членов, находим среди них максимальный по модулю — это элемент: -0.4, он задает ведущую строку — X7. В этой строке так же находим максимальный по модулю отрицательный элемент: -8.3 он находится в столбце X2 который будет ведущим столбцом. Переменная в ведущей строке исключается из базиса, а переменная соответсвующая ведущему столцу включается в базис. Пересчитаем симплекс-таблицу:
| X1 | X7 | X6 | X4 | Своб член | |
| F | -1.988 | 1.072 | 0.193 | 7.036 | -2.229 |
| 4.349 | 0.096 | -0.41 | 3.048 | 14.361 | |
| X3 | 0.807 | -0.157 | -0.084 | 0.422 | 0.663 |
| X2 | 0.313 | -0.12 | 0.012 | -0.06 | 0.048 |
Так как в столбце свободных членов нет отрицательных элементов, то найдено допустимое решение.В строке F имеются отрицательные элементы, это означает что полученое решение не оптимально. Определим ведущий столбец. Для этого найдем в строке F максимальный по модулю отрицательный элемент — это -1.988 Ведущей строкой будет та для которой отношение свободного члена к соответствующему элементу ведущего столбца минимально. Ведущей строкой является X2, а ведущий элемент: 0.313.
| X2 | X7 | X6 | X4 | Своб член | |
| F | 6.351 | 0.31 | 0.269 | 6.655 | -1.924 |
| X5 | -13.895 | 1.763 | -0.577 | 3.882 | 13.694 |
| X3 | -2.578 | 0.152 | -0.115 | 0.577 | 0.539 |
| X1 | 3.195 | -0.383 | 0.038 | 0.153 |
Так как в строке F нет отрицательных элементов, то
найдено оптимальное решение. Так как исходной задачей был поиск минимума, то оптимальным решением будет свободный член строки F, взятый с противоположным знаком. F=1.924
при значениях переменных равных: x3=0.539, x1=0.153. Переменные x2 и x4 не входят в базис, поэтому x2=0 x4=0.
Назад
www.uchimatchast.ru
Двойственный симплекс-метод решения задач линейного программирования
Метод, при котором вначале симплекс-методом решается одна из взаимно двойственных задач, а затем оптимум и оптимальное решение другой задачи находятся с помощью теорем двойственности, называется
Теорема 1 (Первая теорема двойственности). Если одна из взаимно двойственных задач имеет оптимальное решение, то его имеет и
другая, причем оптимальные значения их целевых функций равны:
. (7.1)
Если целевая функция исходной задачи не ограничена, то система ограничений двойственной задачи несовместна.
Примечание: утверждение, обратное по отношению ко второй части первой теоремы двойственности, в общем случае неверно.
Установим соответствие между переменными взаимно двойственных задач.
Теорема 2. Компоненты оптимального плана двойственной задачи (обладающие условием неотрицательности) равны абсолютным значениям коэффициентов при соответствующих переменных целевой функции исходной задачи, выраженной через свободные переменные ее оптимального решения.
Компоненты оптимального плана двойственной задачи (не ограниченные по знаку) равны значениям коэффициентов при соответствующих переменных целевой функции исходной задачи, выраженной через свободные переменные ее оптимального решения.
Теорема 3. Положительным (ненулевым) компонентам оптимального решения одной из задач симметричной двойственной пары соответствуют нулевые компоненты оптимального решения другой задачи, т.е. для любых и :
Теорема 4 (Третья теорема двойственности). Компоненты оптимального плана двойственной задачи равны значениям частных производных линейной функции по соответствующим аргументам, т.е.
. (7.2)
Экономическая интерпретация третьей теоремы двойственности: компоненты оптимального плана двойственной задачи показывают, на сколько денежных единиц изменится максимальная прибыль (выручка) от реализации продукции при изменении запаса соответствующего ресурса на одну единицу.
Пример 9.1. На основе решения примера 5.2 (файл «Алгоритм и примеры симплекс-метода») определим двойственным симплекс- методом оптимальное решение двойственной задачи.
Исходная задача | Двойственная задача |
Данная двойственная пара является симметричной. Задачи записаны в стандартной форме, приведем их к каноническому виду:
Исходная задача | Двойственная задача |
Установим соответствие между переменными взаимно двойственных задач.
На основе решения примера 5.2. симплекс-таблица последней итерации (таблица 5.10) имеет вид:
Таблица 9.3
Симплекс-таблица оптимального решения исходной задачи
В соответствии с теоремой 2, оптимальные значения переменных и будут равны абсолютным значениям коэффициентов при соответствующих переменных целевой функции исходной задачи, выраженной через свободные переменные ее оптимального решения.
По таблице 9.3 выпишем целевую функцию исходной задачи, выраженную через свободные переменные ее оптимального решения:
.
Следовательно, , .
Переменные , , и не присутствуют в целевой функции (т.е. коэффициенты при них равны нулю), следовательно, оптимальные значения соответствующих им переменных , , и равны нулю.
В соответствии с теоремой 1, .
Таким образом, оптимальное значение целевой функции , которое достигается при .
Ответ: , .
Пример 9.2. На основе решения исходной задачи найти оптимальное решение двойственной задачи используя двойственный симплекс-метод.
Исходная задача | Двойственная задача |
Данная двойственная пара является несимметричной. Приведем к каноническому виду двойственную задачу.
Исходная задача | Двойственная задача |
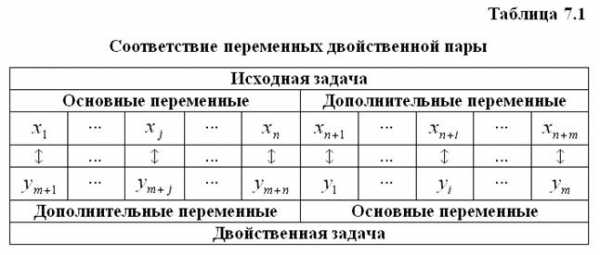
Для установления соответствия переменных двойственной пары введем в исходную задачу две недостающие фиктивные переменные.
Исходная задача | Двойственная задача |
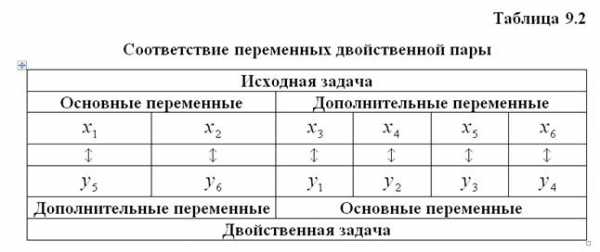
Установим соответствие между переменными взаимно двойственных задач.
Таблица 9.4
Соответствие переменных двойственной пары
Решим исходную задачу симплекс-методом.
Используя метод Жордана-Гаусса, выделим в системе ограничений исходной задачи в качестве базисных переменные и (примечание: не использовать в качестве базисных фиктивные переменные).
В результате преобразований получим следующую матрицу коэффициентов:
.
Система ограничений исходной задачи примет следующий вид:
Выразим базисные переменные через свободные, в результате исходная задача примет следующий вид:
Подставив полученные значения базисных переменных в целевую функцию, она примет следующий вид:
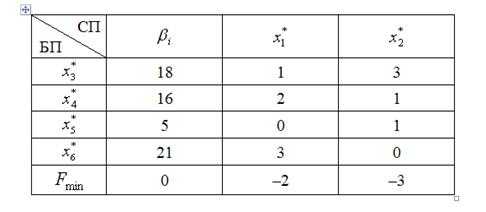
В результате решения симплекс-методом преобразованной исходной задачи на последней итерации получим следующую симплекс-таблицу:
Таблица 9.5
Симплекс-таблица оптимального решения исходной задачи
СП БП | |||||
3 | -1/3 | 5/3 | -1/3 | 2/3 | |
3 | 1/3 | 4/3 | -2/3 | 1/3 | |
12 | 5/3 | 23/3 | -7/3 | 5/3 |
Примечание: при проверке признаков несовместности системы ограничений, неограниченности целевой функции, оптимальности найденного допустимого базисного решения, а также определении разрешающего элемента, колонки фиктивных переменных не учитываются.
В соответствии с теоремой 3, оптимальные значения переменных и будут равны абсолютным значениям коэффициентов при соответствующих переменных целевой функции исходной задачи, выраженной через свободные переменные ее оптимального решения.
Так как переменные , не ограничены по знаку, то их оптимальные значения будут равны значениям коэффициентов при соответствующих переменных целевой функции исходной задачи, выраженной через свободные переменные ее оптимального решения.
.
Согласно таблице соответствия переменных (таблица 9.4):
, , , .
Переменные и не присутствуют в целевой функции (т.е. коэффициенты при них равны нулю), следовательно, оптимальные значения соответствующих им переменных и равны нулю.
В соответствии с теоремой 1, .
Таким образом, оптимальное значение целевой функции , которое достигается при .
Ответ: , .
Еще записи по теме
www.ikasteko.ru
Решить задачу линейного программирования симплекс методом
Методы решения задачи линейного программирования
Опорные решения задачи линейного программирования
Пусть дана задача линейного программирования в канонической форме записи
(1)
при условиях
(2)
(3)
Будем обозначать через множество решений системы (2) – (3). Предположим, что , где – ранг матрицы , – количество уравнений в системе (2).
Из системы векторов-столбцов матрицы выберем некоторую линейно независимую подсистему из векторов . Она существует, так как . Эта система образует базис в . Обозначим через , . Назовем множеством базисных значений индекса , – базиснойподматрицей матрицы . Координаты вектора будем называть базисными, если , и небазисными в противном случае.
Запишем систему (2) в виде . Разобьем слагаемые левой части на базисные и небазисные, то есть
. (4)
Определим частное решение этой системы следующим образом. Положим в (4) все небазисные переменные равными нулю . Тогда система (4) примет вид
. (5)
Назовем (5) базисной подсистемой системы уравнений (2). Обозначим через вектор, составленный из базисных координат вектора . Тогда систему (2) можно переписать в векторно-матричном виде
. (6)
Так как подматрица является базисной, она
невырождена. Поэтому система (6) имеет единственное решение . Полученное таким образом частное решение системы (2) назовем опорным решением прямой задачи линейного программирования, соответствующим базису . (Иногда опорное решение также называют базисным). Как видим, базису соответствует единственное опорное решение. Очевидно, что число опорных решений конечно.
Для данного базиса определим также и опорное решение двойственной задачи линейного программирования. Напомним, что задача двойственная к канонической имеет вид
(7)
при условиях
.
(8)
Запишем систему (8) в виде
. (9)
Напомним, что множество решений системы (8) обозначается через .
Определим вектор двойственных переменных из условия выполнения базисных ограничений в системе (9) как равенств. Получим следующую систему линейных уравнений:
. (10)
Обозначим через вектор, составленный из ба-
зисных координат вектора . Тогда систему (10) можно переписать в векторно-матричном виде
. (11)
Система (11) также имеет единственное решение .
Назовем его опорным (базисным) решением двойственной задачи линейного программирования, соответствующим базису . Это опорное решение также определяется однозначно.
Итак, любому базису соответствуют два вектора – два опорных решения и прямой и двойственной задач линейного программирования, соответственно.
Определим далее следующие разновидности базисов и опорных решений. Если все координаты опорного решения неотрицательны, то базис, которому соответствует это опорное решение, называется допустимым. В этом случае вектор называется опорным планом прямой задачи линейного программирования, а соответствующее тому же базису опорное решение называется псевдопланом двойственной задачи. Фактически для допустимости базиса достаточно неотрицательности базисных координат . Заметим, что опорный план является допустимым вектором прямой задачи линейного программирования ( ).
Если опорное решение удовлетворяет всем ограничениям (9) двойственной задачи, то базис, которому соответствует это опорное решение, называется двойственно допустимым. В этом случае вектор называется опорным планом двойственной задачи линейного программирования, а соответствующее тому же базису опорное реше-
ние называется псевдопланом прямой задачи.
Для двойственной допустимости базиса достаточно выполнения только небазисных неравенств . Заметим, что опорный план является допустимым вектором двойственной задачи линейного программирования ( ).
Разности левых и правых частей неравенств (9) обозначим через , . Тогда двойственную допустимость базиса можно устанавливать, проверяя неотрицательность всех . Заметим, что, как следует непосредственно из определения, все базисные невязки равны нулю ( ).
Пример решения прямой и двойственной задачи симплекс методом
Поэтому достаточно убедиться в выполнении неравенств для всех .
Познакомимся далее с некоторыми свойствами опорных решений, которые понадобятся нам при отыскании решений задач линейного программирования.
Теорема 1. Пусть и – опорные решения задачи линейного программирования, соответствующие некоторому базису , тогда имеет место равенство .
Доказательство. Из определений опорных решений легко получить равенства
,
откуда и следует справедливость теоремы.
Теорема 2. (Критерий оптимальности опор-ных решений) Если базис одновременно допустим и двойственно допустим, то соответствующие ему опорные решенияи являются решениями, соответственно, прямой и двойственной задач линейного программирования.
Доказательство. Справедливость этого утверждения следует из теории двойственности в линейном программировании и теоремы 1.
Теорема 3. Допустимое решение задачи (1) – (3) является опорным планом задачи тогда и только тогда, когда оно является вершиной выпуклого многогранного множества .
Доказательство. Пусть – опорный план задачи (1) – (3). Докажем, что – вершина множества . По определению опорный план – допустимое опорное решение, соответствующее некоторому базису , то есть – решениесистемы линейных уравнений относительно переменных
Легко увидеть, что эта система имеет единственное решение. Значит, несущая плоскость грани, содержащей точку , имеет размерность 0. Следовательно, – вершина множества .
Обратно. Пусть – вершина множества . Докажем, что – опорный план задачи (1) – (3). Так как – вершина, то она является гранью множества , размерность которой равна нулю. Следовательно, у вектора найдется не менее нулевых компонент, множество номеров которых обозначим . Таким образом, – единственное решение системы
(12)
где . Поэтому осталось доказать, что система векторов линейно независима. Предположим противное. Тогда существуют числа не все равные нулю, такие что . Поэтому
Это означает, что система (12) имеет решение, отличное от , что противоречит единственности ее решения. Таким образом, – базис, а вектор – соответствующий ему опорный план задачи (1) – (3). Что и требовалось.
Заметим, что допустимое решение задачи (7), (8) (двойственной задаче (1) – (3)) также является опорным планом тогда и только тогда, когда оно является вершиной допустимого множества .
Дата публикования: 2015-01-10; Прочитано: 695 | Нарушение авторского права страницы
laservirta.ru
Решение задач линейного программирования симплекс методом
КУРСОВАЯ РАБОТА
«Решение задач линейного программирования симплекс методом»
Введение
Задача линейного программирования состоит в том, что необходимо максимизировать или минимизировать некоторый линейный функционал на многомерном пространстве при заданных линейных ограничениях.
Заметим, что каждое из линейных неравенств на переменные ограничивает полупространство в соответствующем линейном пространстве. В результате все неравенства ограничивают некоторый многогранник (возможно, бесконечный), называемый также полиэдральным комплексом. Уравнение W(x) = c, где W(x) — максимизируемый (или минимизируемый) линейный функционал, порождает гиперплоскость L(c). Зависимость от c порождает семейство параллельных гиперплоскостей. Тогда экстремальная задача приобретает следующую формулировку — требуется найти такое наибольшее c, что гиперплоскость L(c) пересекает многогранник хотя бы в одной точке. Заметим, что пересечение оптимальной гиперплоскости и многогранника будет содержать хотя бы одну вершину, причём, их будет более одной, если пересечение содержит ребро или k-мерную грань. Поэтому максимум функционала можно искать в вершинах многогранника. Принцип симплекс-метода состоит в том, что выбирается одна из вершин многогранника, после чего начинается движение по его рёбрам от вершины к вершине в сторону увеличения значения функционала. Когда переход по ребру из текущей вершины в другую вершину с более высоким значением функционала невозможен, считается, что оптимальное значение c найдено.
Целью данной курсовой работы является нахождения решения задач симплекс методом.
Задачи курсовой работы:
.Изучить что такое симплекс-метод
.Рассмотреть методы решения
.Рассмотреть решение задачи
1. Теоретические основы линейного программирования
.1 Что такое линейное программирование
Задачи оптимального планирования, связанные с отысканием оптимума заданной целевой функции (линейной формы) при наличии ограничений в виде линейных уравнений или линейных неравенств относятся к задачам линейного программирования.
Линейное программирование — наиболее разработанный и широко применяемый раздел математического программирования. Это объясняется следующим:
·математические модели очень большого числа экономических задач линейны относительно искомых переменных;
·эти типы задач в настоящее время наиболее изучены;
·для них разработаны специальные конечные методы, с помощью которых эти задачи решаются, и соответствующие стандартные программы для их решения на ЭВМ;
·многие задачи линейного программирования, будучи решенными, нашли уже сейчас широкое практическое применение в народном хозяйстве;
·некоторые задачи, которые в первоначальной формулировке не являются линейными, после ряда дополнительных ограничений и допущений могут стать линейными или могут быть приведены к такой форме, что их можно решать методами линейного программирования.
Итак, Линейное программирование — это направление математического программирования, изучающее методы решения экстремальных задач, которые характеризуются линейной зависимостью между переменными и линейным критерием.
Необходимым условием постановки задачи линейного программирования являются ограничения на наличие ресурсов, величину спроса, производственную мощность предприятия и другие производственные факторы.
Сущность линейного программирования состоит в нахождении точек наибольшего или наименьшего значения некоторой функции при определенном наборе ограничений, налагаемых на аргументы и образующих систему ограничений, которая имеет, как правило, бесконечное множество решений. Каждая совокупность значений переменных (аргументов функции F), которые удовлетворяют системе ограничений, называется допустимым планом задачи линейного программирования. Функция F, максимум или минимум которой определяется, называется целевой функцией задачи. Допустимый план, на котором достигается максимум или минимум функции F, называется оптимальным планом задачи.
Система ограничений, определяющая множество планов, диктуется условиями производства. Задачей линейного программирования (ЗЛП) является выбор из множества допустимых планов наиболее выгодного (оптимального).
В общей постановке задача линейного программирования выглядит следующим образом:
Имеются какие-то переменные х = (х1, х2, … хn) и функция этих переменных f(x) = f (х1, х2, … хn), которая носит название целевой функции. Ставится задача: найти экстремум (максимум или минимум) целевой функции f(x) при условии, что переменные x принадлежат некоторой области G:
1.2 Симплекс-0метод
Симплекс-метод является основным в линейном программировании. Решение задачи начинается с рассмотрений одной из вершин многогранника условий. Если исследуемая вершина не соответствует максимуму (минимуму), то переходят к соседней, увеличивая значение функции цели при решении задачи на максимум и уменьшая при решении задачи на минимум. Таким образом, переход от одной вершины к другой улучшает значение функции цели. Так как число вершин многогранника ограничено, то за конечное число шагов гарантируется нахождение оптимального значения или установление того факта, что задача неразрешима.
Этот метод является универсальным, применимым к любой задаче линейного программирования в канонической форме. Система ограничений здесь — система линейных уравнений, в которой количество неизвестных больше количества уравнений. Если ранг системы равен r, то мы можем выбрать r неизвестных, которые выразим через остальные неизвестные. Для определенности предположим, что выбраны первые, идущие подряд, неизвестные X1, X2,…, Xr. Тогда наша система уравнений может быть записана как
К такому виду можно привести любую совместную систему, например, методом Гаусса. Правда, не всегда можно выражать через остальные первые r неизвестных (мы это сделали для определенности записи). Однако такие r неизвестных обязательно найдутся. Эти неизвестные (переменные) называются базисными, остальные свободными.
Придавая определенные значения свободным переменным и вычисляя значения базисных (выраженных через свободные), мы будем получать различные решения нашей системы ограничений. Таким образом, можно получить любое ее решение. Нас будут интересовать особые решения, получаемые в случае, когда свободные переменные равны нулю. Такие решения называются базисными, их столько же, сколько различных базисных видов у данной системы ограничений. Базисное решение называется допустимым базисным решением или опорным решением, если в нем значения переменных неотрицательны. Если в качестве базисных взяты переменные X1, X2,…, Xr, то решение {b1, b2,…, br, 0,…, 0} будет опорным при условии, что b1, b2,…, br ? 0.
Симплекс-метод основан на теореме, которая называется фундаментальной теоремой симплекс-метода. Среди оптимальных планов задачи линейного программирования в канонической форме обязательно есть опорное решение ее системы ограничений. Если оптимальный план задачи единственен, то он совпадает с некоторым опорным решением. Различных опорных решений системы ограничений конечное число. Поэтому решение задачи в канонической форме можно было бы искать перебором опорных решений и выбором среди них того, для которого значение F самое большое. Но, во-первых, все опорные решения неизвестны и их нужно находить, a, во-вторых, в реальных задачах этих решений очень много и прямой перебор вряд ли возможен. Симплекс-метод представляет собой некоторую процедуру направленного перебора опорных решений. Исходя из некоторого, найденного заранее опорного решения по определенному алгоритму симплекс-метода мы подсчитываем новое опорное решение, на котором значение целевой функции F не меньше, чем на старом. После ряда шагов мы приходим к опорному решению, которое является оптимальным планом.
1.3Пример решения линейного уравнения симплекс-методом
линейный симплекс уравнение
К такому виду можно привести любую совместную систему, например, методом Гаусса. Правда, не всегда можно выражать через остальные первые r неизвестных (мы это сделали для определенности записи). Однако такие r неизвестных обязательно найдутся. Эти неизвестные (переменные) называются базисными, остальные свободными.
Придавая определенные значения свободным переменным и вычисляя значения базисных (выраженных через свободные), мы будем получать различные решения нашей системы ограничений. Таким образом, можно получить любое ее решение. Нас будут интересовать особые решения, получаемые в случае, когда свободные переменные равны нулю. Такие решения называются базисными, их столько же, сколько различных базисных видов у данной системы ограничений. Базисное решение называется допустимым базисным решением или опорным решением, если в нем значения переменных неотрицательны. Если в качестве базисных взяты переменные X1, X2,…, Xr, то решение {b1, b2,…, br, 0,…, 0} будет опорным при условии, что b1, b2,…, br ? 0.
Симплекс-метод основан на теореме, которая называется фундаментальной теоремой симплекс-метода. Среди оптимальных планов задачи линейного программирования в канонической форме обязательно есть опорное решение ее системы ограничений. Если оптимальный план задачи единственен, то он совпадает с некоторым опорным решением. Различных опорных решений системы ограничений конечное число. Поэтому решение задачи в канонической форме можно было бы искать перебором опорных решений и выбором среди них того, для которого значение F самое большое. Но, во-первых, все опорные решения неизвестны и их нужно находить, a, во-вторых, в реальных задачах этих решений очень много и прямой перебор вряд ли возможен. Симплекс-метод представляет собой некоторую процедуру направленного перебора опорных решений. Исходя из некоторого, найденного заранее опорного решения по определенному алгоритму симплекс-метода мы подсчитываем новое опорное решение, на котором значение целевой функции F не меньше, чем на старом. После ряда шагов мы приходим к опорному решению, которое является оптимальным планом.
Итак, симплексный метод вносит определенный порядок как при нахождении первого (исходного) базисного решения, так и при переходе к другим базисным решениям. Его идея состоит в следующем.
Имея систему ограничений, приведенную к общему виду, то есть к системе m линейных уравнений с n переменными (m < n), находят любое базисное решение этой системы, заботясь только о том, чтобы найти его как можно проще.
Если первое же найденное базисное решение оказалось допустимым, то проверяют его на оптимальность. Если оно не оптимально, то, осуществляется переход к другому, обязательно допустимому базисному решению.
Симплексный метод гарантирует, что при этом новом решении линейная форма, если и не достигнет оптимума, то приблизится к нему. С новым допустимым базисным решением поступают так же, пока не находят решение, которое является оптимальным.
Если первое найденное базисное решение окажется недопустимым, то с помощью симплексного метода осуществляется переход к другим базисным решениям, которые приближают нас к области допустимых решений, пока на каком-то шаге решения либо базисное решение окажется допустимым и к нему применяют алгоритм симплексного метода, либо мы убеждаемся в противоречивости системы ограничений.
Таким образом, применение симплексного метода распадается на два этапа: нахождение допустимого базисного решения системы ограничений или установление факта ее несовместности; нахождение оптимального решения.
При этом каждый этап может включать несколько шагов, соответствующих тому или иному базисному решению. Но так как число базисных решений всегда ограниченно, то ограниченно и число шагов симплексного метода.
Приведенная схема симплексного метода явно выражает его алгоритмический характер (характер четкого предписания о выполнении последовательных операций), что позволяет успешно программировать и реализовать этот метод на ЭВМ. Задачи же с небольшим числом переменных и ограничений могут быть решены симплексным методом вручную.
Не останавливаясь подробнее на сути алгоритма, опишем его вычислительную сторону. Вычисления по симплекс-методу организуются в виде симплекс-таблиц, которые являются сокращенной записью задачи линейного программирования в канонической форме. Перед составлением симплекс-таблицы задача должна быть преобразована, система ограничений приведена к допустимому базисному виду, c помощью которого из целевой функции должны быть исключены базисные переменные. Вопрос об этих предварительных преобразованиях мы рассмотрим ниже. Сейчас же будем считать, что они уже выполнены и задача имеет вид:
Здесь для определенности записи считается, что в качестве базисных переменных можно взять переменные X1, X2,…, Xr и что при этом b1, b2,…, br ? 0 (соответствующее базисное решение является опорным)
1.4 Пример составления симплекс-таблицы
Для составления симплекс-таблицы во всех равенствах в условии задачи члены, содержащие переменные, переносятся в левую часть, свободные оставляются справа, т.е. задача записывается в виде системы равенств:
Далее эта система оформляется в виде симплекс-таблиц:
Примечание. Названия базисных переменных здесь взяты лишь для определенности записи и в реальной таблице могут оказаться другими.
Порядок работы с симплекс таблицей
Первая симплекс-таблица подвергается преобразованию, суть которого заключается в переходе к новому опорному решению.
Алгоритм перехода к следующей таблице такой:
·просматривается последняя строка (индексная) таблицы и среди коэффициентов этой строки (исключая столбец свободных членов) выбирается наименьшее отрицательное число при отыскании max, либо наибольшее положительное при задачи на min. Если такового нет, то исходное базисное решение является оптимальным и данная таблица является последней;
·просматривается столбец таблицы, отвечающий выбранному отрицательному (положительному) коэффициенту в последней строке — ключевой столбец, и в этом столбце выбираются положительные коэффициенты. Если таковых нет, то целевая функция неограниченна на области допустимых значений переменных и задача решений не имеет;
·среди выбранных коэффициентов столбца выбирается тот, для которого абсолютная величина отношения соответствующего свободного члена (находящегося в столбце свободных членов) к этому элементу минимальна. Этот коэффициент называется разрешающим, а строка в которой он находится ключевой;
·в дальнейшем базисная переменная, отвечающая строке разрешающего элемента, должна быть переведена в разряд свободных, а свободная переменная, отвечающая столбцу разрешающего элемента, вводится в число базисных. Строится новая таблица, содержащая новые названия базисных переменных:
·разделим каждый элемент ключевой строки (исключая столбец свободных членов) на разрешающий элемент и полученные значения запишем в строку с измененной базисной переменной новой симплекс таблицы.
·строка разрешающего элемента делится на этот элемент и полученная строка записывается в новую таблицу на то же место.
·в новой таблице все элементы ключевого столбца = 0, кроме разрезающего, он всегда равен 1.
·столбец, у которого в ключевой строке имеется 0, в новой таблице будет таким же.
·строка, у которой в ключевом столбце имеется 0, в новой таблице будет такой же.
·в остальные клетки новой таблицы записывается результат преобразования элементов старой таблицы:
В результате получают новую симплекс-таблицу, отвечающую новому базисному решению.
Теперь следует просмотреть строку целевой функции (индексную), если в ней нет отрицательных значений (в задачи на нахождение максимального значения), либо положительных (в задачи на нахождение минимального значения) кроме стоящего на месте (свободного столбца), то значит, что оптимальное решение получено. В противном случае, переходим к новой симплекс таблице по выше описанному алгоритму.
Рассмотрим порядок решения задачи с помощью симплекс-таблиц на примере.
Если в только что рассмотренной задаче первое же полученное без всякого труда базисное решение оказалось допустимым, то в ряде задач исходное базисное решение может иметь одну, две и т.д. отрицательных компонент, т.е. быть недопустимым. В таких задачах надо сначала применить первый этап симплексного метода, т.е. с его помощью найти какое-либо допустимое решение (или установить несовместность системы ограничений), а затем уже искать оптимальное решение (сделать вывод о противоречии условий задачи). При этом надо помнить, что на первом этапе применения симплексного метода, т.е. пока мы ищем допустимое базисное решение, линейная форма не рассматривается, а все преобразования относятся только к системе ограничений.
Пусть задача линейного программирования задана в канонической форме, состоящей из m независимых уравнений с n переменными (или же она приведена к такому виду после введения добавочных неотрицательных переменных).
Выберем группу m основных переменных, которые позволяют найти исходное базисное решение (не нарушая общности, можем считать, что основными переменными являются первые m переменных). Выразив эти основные переменные через неосновные, получим следующую систему ограничений:
Этому способу разбиения переменных на основные и неосновные соответствует базисное решение (k1, k2,…, km, 0, 0,…, 0). Рассмотрим общий случай, когда это решение является недопустимым. От полученного базисного решения следует сначала перейти к какому-нибудь допустимому базисному решению. Причем не обязательно, чтобы этот переход осуществлялся сразу, за один шаг.
По предположению исходное базисное решение недопустимо. Следовательно, среди свободных членов системы ограничений (2.16) имеется хотя бы один отрицательный (число отрицательных свободных членов этой системы совпадает с числом отрицательных компонент исходного базисного решения). Пусть им является свободный член i-го уравнения ki, т.е. основная переменная xi в соответствующем базисном решении отрицательна.
Для перехода к новому базисному решению необходимо: выбрать переменную, которую следует перевести из неосновных в основные; установить, какая основная переменная при этом перейдет в число неосновных переменных. При переводе неосновной переменной в основные ее значение, как правило, возрастает: вместо нуля в исходном базисном решении оно будет положительно в новом базисном решении (исключая случай вырождения). Вернемся к i-му уравнению системы (2.16), содержащему отрицательный свободный член k1. Оно показывает, что значение переменной xi растет при возрастании значений тех неосновных переменных, которые в этом уравнении имеют положительные коэффициенты. Отсюда следует, что в основные можно переводить те неосновные переменные, которые в уравнении системы (2.16) с отрицательным свободным членом имеют положительные коэффициенты.
Здесь может быть три исхода:
1.в i-м уравнении системы (2.16) нет основных переменных с положительными коэффициентами, т.е. все коэффициенты bi, m+j (как и свободный член ki) отрицательны. В этом случае система ограничений несовместна, она не имеет ни одного допустимого решения, а следовательно, и оптимального;
2.в i-м уравнения имеется одна переменная xm+j, коэффициент b при которой положителен. В этом случае именно эта переменная переводится в основные;
.в i-м уравнении имеется несколько переменных с положительными коэффициентами bi, m+j. В этом случае в основные можно перевести любую из них.
Далее необходимо установить, какая основная переменная должна быть переведена в число неосновных на место переводимой в основные. В неосновные переводится та основная переменная, которая первой обратится в нуль при возрастании от нуля неосновной переменной, переводимой в основные. Иными словами, пользуемся тем же правилом, которое было установлено ранее. Находятся отношения свободных членов к коэффициентам при переменной, переводимой в основные, из всех уравнений, где знаки свободных членов и указанных коэффициентов противоположны, берется абсолютная величина этих отношений и из них выбирается наименьшая (если в некоторых уравнениях знаки свободных членов и указанных коэффициентов совпадают или в каких-то уравнениях переменная, переводимая в основные, отсутствует, то указанное отношение считается равным).
Уравнение, из которого получено наименьшее отношение, выделяется. Выделенное уравнение и покажет, какая из основных переменных должна быть переведена в неосновные. Выразив новые основные переменные через неосновные, перейдем к следующему базисному решению.
Если выделенным окажется уравнение с отрицательным свободным членом, то в новом базисном решении число отрицательных компонент будет на единицу меньше, чем в исходном. Если же выделенным окажется уравнение с положительным (или равным нулю) свободным членом, то в новом базисном решении число отрицательных компонент сохранится таким же, каким оно было в исходном базисном решении.
Таким образом, при переходе к новому базисному решению выгодно, чтобы выделенным оказалось уравнение с отрицательным свободным членом, и если есть возможность выбора, то предпочтение следует отдать такому обмену переменных, при котором выделенным оказывается уравнение с отрицательным свободным членом.
Итак, мы получим новое, улучшенное базисное решение, которое ближе к области допустимых решений системы ограничений. Если оно недопустимое, то к нему следует применить ту же схему еще раз. В результате через конечное число шагов мы получим допустимое базисное решение. Как только будет найдено допустимое базисное решение, переходят ко второму этапу симплексного метода, сущность которого рассмотрена при решении задачи
После овладения способом нахождения первого допустимого базисного решения любая задача линейного программирования может иметь трудности лишь вычислительного характера.
2. Алгоритм симплекс-метода
Усиленная постановка задачи
Рассмотрим следующую задачу линейного программирования:
Теперь поставим эту задачу в эквивалентной усиленной форме. Необходимо максимизировать Z, где:
Здесь x — переменные из исходного линейного функционала, xs — новые переменные, дополняющие старые таким образом, что неравенство переходит в равенство, c — коэффициенты исходного линейного функционала, Z — переменная, которую необходимо максимизировать. Полупространства и в пересечении образуют многогранник, представляющий множество допустимых решений. Разница между числом переменных и уравнений даёт нам число степеней свободы. Проще говоря, если мы рассматриваем вершину многогранника, то это число рёбер, по которым мы можем продолжать движение. Тогда мы можем присвоить этому числу переменных значение 0 и назвать их «непростыми». Остальные переменные при этом будут вычисляться однозначно и называться «простыми». Полученная точка будет вершиной в пересечении соответствующих непростым переменным гиперплоскостей. Для того, чтобы найти т. н. начальное допустимое решение (вершину, из которой мы начнём движение), присвоим всем изначальным переменным x значение 0 и будем их считать непростыми, а все новые будем считать простыми. При этом начальное допустимое решение вычисляется однозначно:.
Алгоритм
Теперь приведём шаги алгоритма. На каждом шаге мы будем менять множества простых и непростых векторов (двигаться по рёбрам), и матрица будет иметь следующий вид:
где cB — коэффициенты вектора c соответствующие простым переменным (переменным xs соответствуют 0), B — столбцы, соответствующие простым переменным. Матрицу, образованную оставшимися столбцами обозначим D. Почему матрица будет иметь такой вид поясним в описании шагов алгоритма.
Первый шаг
Выбираем начальное допустимое значение, как указано выше. На первом шаге B — единичная матрица, так как простыми переменными являются xs. cB — нулевой вектор по тем же причинам.
Второй шаг
Покажем, что в выражении только непростые переменные имеют ненулевой коэффициент. Заметим, что из выражения Ax+xs=b простые переменные однозначно выражаются через непростые, так как число простых переменных равно числу уравнений. Пусть x ‘ — простые, а x ‘ ‘ — непростые переменные на данной итерации. Уравнение Ax+xs=b можно переписать, как Bx ‘+Dx ‘ ‘=b. Умножим его на слева: Таким образом мы выразили простые переменные через непростые, и в выражении, эквивалентному левой части равенства, все простые переменные имеют единичные коэффициенты. Поэтому, если прибавить к равенству равенство, то в полученном равенстве все простые переменные будут иметь нулевой коэффициент — все простые переменные вида x сократятся, а простые переменные вида xs не войдут в выражение.
Выберем ребро, по которому мы будем перемещаться. Поскольку мы хотим максимизировать Z, то необходимо выбрать переменную, которая будет более всех уменьшать выражение
.
Для этого выберем переменную, которая имеет наибольший по модулю отрицательный коэффициент. Если таких переменных нет, то есть все коэффициенты этого выражения неотрицательны, то мы пришли в искомую вершину и нашли оптимальное решение. В противном случае начнём увеличивать эту непростую переменную, то есть перемещаться по соответствующему ей ребру. Эту переменную назовём входящей.
Третий шаг
Теперь необходимо понять, какая простая переменная первой обратится в ноль по мере увеличения входящей переменной. Для этого достаточно рассмотреть систему:
При фиксированных значениях непростых переменных система однозначно разрешима относительно простых, поэтому мы можем определить, какая из простых переменных первой достигнет нуля при увеличении входящей. Эту переменную назовем выходящей. Это будет означать, что мы натолкнулись на новую вершину. Теперь входящую и выходящую переменную поменяем местами — входящая «войдёт» в простую, а выходящая из них «выйдет» в непростые. Теперь перепишем матрицу B и вектор cB в соответствии с новыми наборами простых и непростых переменных, после чего вернёмся ко второму шагу. x»
Поскольку число вершин, конечно, то алгоритм однажды закончится. Найденная вершина будет являться оптимальным решением.
3. Двухфазный симплекс-метод
Причины использования
Если в условии задачи линейного программирования не все ограничения представлены неравенствами типа «?», то далеко не всегда нулевой вектор будет допустимым решением. Однако каждая итерация симплекс-метода является переходом от одной вершины к другой, и если неизвестно ни одной вершины, алгоритм вообще не может быть начат.
Процесс нахождения исходной вершины не сильно отличается от однофазного симплекс-метода, однако может в итоге оказаться сложнее, чем дальнейшая оптимизация.
Модификация ограничений
Все ограничения задачи модифицируются согласно следующим правилам:
·ограничения типа «?» переводятся на равенства созданием дополнительной переменной с коэффициентом «+1». Эта модификация проводится и в однофазном симплекс-методе, дополнительные переменные в дальнейшем используются как исходный базис.
·ограничения типа «?» дополняются одной переменной с коэффициентом «?1». Поскольку такая переменная из-за отрицательного коэффициента не может быть использована в исходном базисе, необходимо создать ещё одну, вспомогательную, переменную. Вспомогательные переменные всегда создаются с коэффициентом «+1».
·ограничения типа «=» дополняются одной вспомогательной переменной.
Соответственно, будет создано некоторое количество дополнительных и вспомогательных переменных. В исходный базис выбираются дополнительные переменные с коэффициентом «+1» и все вспомогательные. Осторожно: решение, которому соответствует этот базис, не является допустимым.
Различия между дополнительными и вспомогательными переменными
Несмотря на то, что и дополнительные, и вспомогательные переменные создаются искусственно и используются для создания исходного базиса, их значения в решении сильно отличаются:
·дополнительные переменные сообщают, насколько соответствующее им ограничение «недоиспользовано». Значение дополнительной переменной, равное нулю, соответствует равенству значений правых и левых частей ограничения.
·вспомогательные переменные сообщают, насколько данное условие далеко от допустимого (относительно конкретного ограничения). Если значение вспомогательной переменной больше нуля, то данное решение не выполняет определённое ограничение, а значит не является допустимым.
То есть ненулевое значение дополнительной переменной может (но не должно) сигнализировать о неоптимальности решения. Ненулевое значение вспомогательной переменной сигнализирует о недопустимости решения.
Фазы решения
После того, как было модифицировано условие, создаётся вспомогательная целевая функция. Если вспомогательные переменные были обозначены, как yi, i?{1., k}, то вспомогательную функцию определим, как
.
После этого проводится обыкновенный симплекс-метод относительно вспомогательной целевой функции. Поскольку все вспомогательные переменные увеличивают значение, в ходе алгоритма они будут поочерёдно выводится из базиса, при этом после каждого перехода новое решение будет всё ближе к множеству допустимых решений.
Когда будет найдено оптимальное значение вспомогательной целевой функции, могут возникнуть две ситуации:
·оптимальное значение больше нуля. Это значит, что как минимум одна из вспомогательных переменных осталась в базисе. В таком случае можно сделать вывод, что допустимых решений данной задачи линейного программирования не существует.
·оптимальное значение равно нулю. Это означает, что все вспомогательные переменные были выведены из базиса, и текущее решение является допустимым.
Во втором случае мы имеем допустимый базис, или, иначе говоря, исходное допустимое решение. Можно проводить дальнейшую оптимизацию с учётом исходной целевой функции, при этом уже не обращая внимания на вспомогательные переменные. Это и является второй фазой решения.
4. Модифицированный симплекс-метод
В модифицированном методе матрица
не пересчитывается, хранится и пересчитывается только матрица. В остальном алгоритм похож на вышеописанный.
. Вычисляем двойственные переменные
. Проверка оптимальности. преобразуется в.
Проверка заключается в вычислении для всех столбцов. Столбец со значением < 0 можно вводить в базис.
Часто выбирают минимальное значение, но для этого нужно перебрать все столбцы.
Чаще выбирают значение, меньшее некоторого заданного значения
Если такого столбца не обнаружится, за принимается максимальное найденное абсолютное значение и соответствующий столбец вводится в базис.
. Определение выводимого.
Пусть — вводимый столбец, соответствующий переменной Базиный план — это решение системы Увеличиваем.
Умножим слева на, т.е.
Здесь — базисный план, — разложение вводимого столбца по базису.
Находим максимальное значение, при котором все значения не отрицательны. Если может быть взято как угодно велико, решение не ограничено. В противном случае один из элементов выйдет на нулевое значение. Выводим соответствующий столбец из базиса.
. Пересчет опорного(базисного) плана.
Вычисляем новый опорный план по уже приведенной формуле с найденным значением.
. Пересчитываем обратную к базисной.
Пусть — выводимый столбец.
Матрица B представима в виде
где — базисная матрица без выводимого столбца.
После замены столбца базисная матрица будет иметь вид
Нам нужно найти матрицу, такую что
=> => =>
Откуда
Замечание.
При пересчете матрицы накапливаются ошибки округления. Во избежание получения больших ошибок время от времени матрица пересчитывается полностью. Этот процесс называется «повторением».
Мультипликативный вариант симплекс-метода
В мультипликативном варианте матрица не хранится, хранятся лишь множители
При решении экономических задач часто матрица ограничений разреженная, в таком случае мультипликативный вариант получает дополнительные преимущества — можно хранить мультипликаторы в сжатом виде (не хранить нули).
5. Другие варианты симплекс-метода
Во избежание накопления ошибок округления может использоваться LU-разложение матрицы.
При подавляющем числе ограничений типа «неравенство» может быть использован метод переменного базиса.
Метод основан на том, что базисная матрица может быть представлена в виде
Обратная к ней имеет вид
При относительно небольших размерах матрицы остальная часть матрицы может не храниться.
Таким подходом удается решить задачи с десятками миллионов строк ограничений (например, из теории игр).
Двойственный симплекс-метод
Для реализации двойственного метода необходимо перейти от задачи на минимум к задаче на максимум (или наоборот) путем транспонирования матрицы коэффициентов. При переходе от задачи на минимум целевая функция примет вид:
при ограничениях
.
Теорема двойственности. Если из пары двойственных задач одна обладает оптимальным планом, то и другая имеет решение, причем экстремальные значения линейных функций этих задач равны.
Если линейная функция одной из задач не ограничена, то другая не имеет решения.
Теги: Решение задач линейного программирования симплекс методом Курсовая работа (теория) Математика
dodiplom.ru